![]()
|
|
|
|
Module#1 : THE CHASSIS R ESEARCH AND RESULTSChassis design is as important a consideration as the rest of the system requirements. The sturdiness, load carrying capacity and weight of the chassis is one of the factors that decide the selection of motors. The major factors for selection of material for the chassis were:
We didn’t consider durability to be as important factor a since terrain that the rover is intended to move on is perfectly horizontal. The materials considered for the chassis design were Wood, Metal and Plastic. Fiberglass was not considered due to its high cost. A comparative chart of the properties of materials considered is given below.
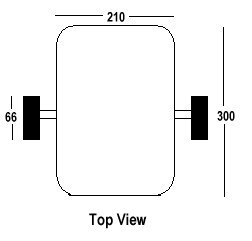
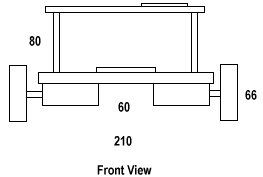
Wood was chosen mainly due to its low cost and ease in machining it into the desired shape. Description : The chassis details are as follows:
Two motors placed at opposite sides of the base to power the vehicle. Each motor has independent speed control so that they can be used to steer the vehicle. Each motor is directly coupled to the the primary wheels. Apart from the primary wheels, there are two supproting wheels at the front and back. These are castor wheels which rotate freely similar to shopping cart wheels. These castor wheels allow the vehicle to turn sharply by rotating around its center axis. This configuration was selected because it allows the vehicle to make tight turns.The motors are powered by 9V batteries strapped on to the rover body. The infra-red sensors, which are used to detect the prescence of an object are placed at the front and just behind the wheels. This gives the sensors maximum scope of detecting an object. In order to restrict the size of the rover chassis the different circuit boards are placed on a deck, which is fixed on the chassis. Thus the rover is a single storeyed structure. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1999 IEEE VESIT Student Branch Hits :
Webmaster : Saumitra Mohan Das |